

| 參數(shù)號 | 參數(shù)名稱 | 設(shè)定值 |
| 1-00 | 控制方式 |
[1] 閉環(huán)轉(zhuǎn)速控制 或 [2] 轉(zhuǎn)矩控制(帶轉(zhuǎn)速反饋) |
| 1-01 | 電機控制原理 | [3] 磁通矢量帶反饋 |
| 1-02 | 電機磁通矢量控制反饋源 | [2] MCB102 |
| 1-10 | 電動機選擇 | [1] 隱極永磁同步電機 |
| 參數(shù)號 | 參數(shù)名稱 | 設(shè)定值 |
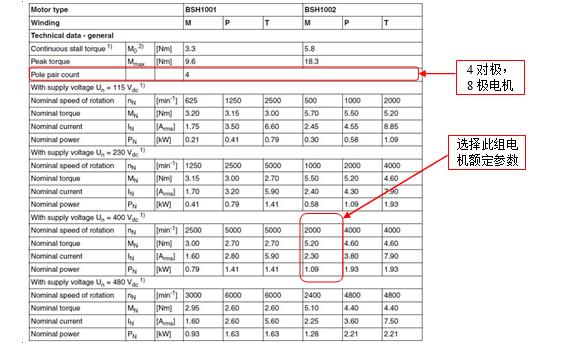
| 1-24 | 電機額定電流 | 2.30 A |
| 1-25 | 電機額定轉(zhuǎn)速 | 2000 rpm |
| 1-26 | 電機額定轉(zhuǎn)矩 | 5.20 Nm |
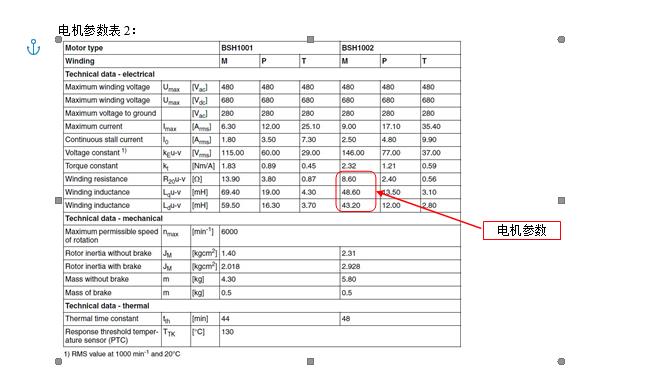
| 1-30 | 定子電阻 | 4.3 Ω |
| 1-37 | d軸電感 | 24.94 mH |
| 1-39 | 電機極數(shù) | 8 極 |
| 參數(shù)號 | 參數(shù)名稱 | 設(shè)定值 |
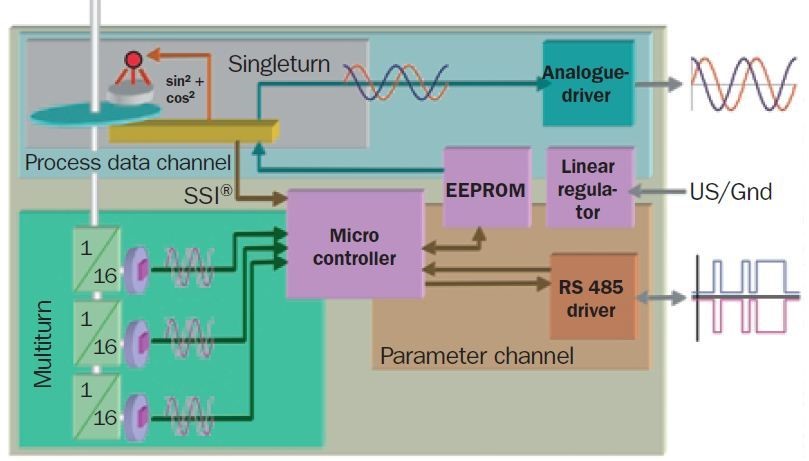
| 17-10 | 增量信號類型 | [2] 正弦1Vpp |
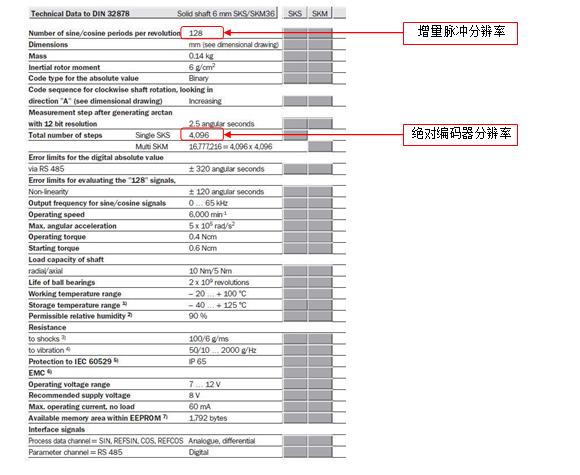
| 17-11 | 增量脈沖分辨率 | 128 ppr |
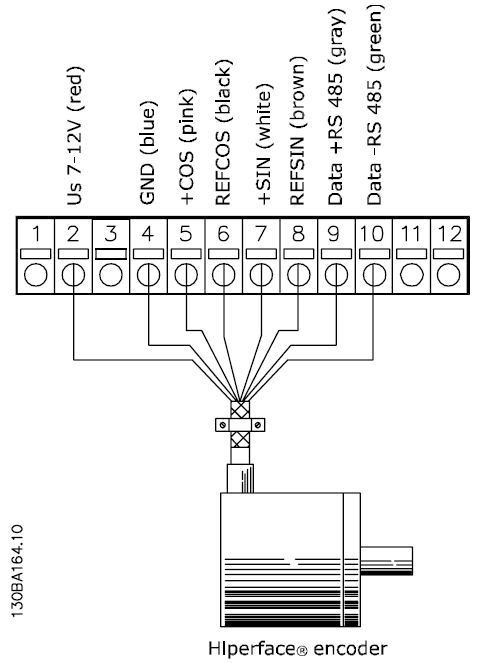
| 17-20 | 絕對協(xié)議選擇 | [1] HIPERFACE |
| 17-21 | 絕對編碼器分辨率 | 4096 ppr |
| 17-34 | HIPERFACE波特率 | [4] 9600 |
| 參數(shù)號 | 參數(shù)名稱 | 設(shè)定值 |
| 32-50 | 從機反饋來源 | [3] 電機控制反饋來源(MCB102) |
| 32-01 | 編碼器分辨率 |
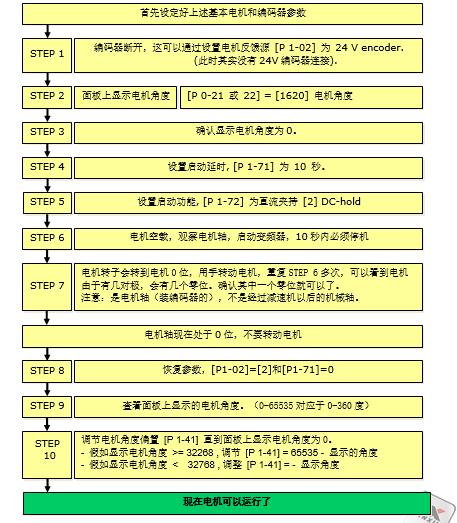
1024 ppr 現(xiàn)在電機每轉(zhuǎn)一圈,當前位置就會增加4096 |
中國 上海市虹口區(qū)
汶水東路918號信南都市工業(yè)園區(qū)五號樓1F
021-65618877
400-888-6560
浙江杭州 | 金華 | 衢州 | 麗水 | 嘉興 | 江蘇南京 | 蘇州 | 無錫 | 昆山 | 南通 | 常州 | 連云港 | 鹽城 | 泰州 | 河南鄭州 | 山東濟南 | 青島 | 安徽合肥 | 蕪湖 | 蚌埠 | 湖北武漢 | 湖南長沙 | 福建福州 | 廈門 | 江西南昌 | 宜春 | 上饒 | 廣東廣州
? 2016 JINXIN Co.,Ltd , All Rights Reserved. 滬ICP備06034666號-1


